新規事業を担当している榎本です。
前回の記事で、私たちがなぜ電子ロッカーを作るという決定をしたのか記載しました。では早速、ロッカーを動かすための物理的な構成を書いていきます!
目次
全体図
まずは全体図の写真です。かなりシンプルな構成ですね。基本的にECサイトから受け取った「ロッカーの解錠・施錠」に関する命令をラズパイ が受け取って複数のサーボモータに伝達する形で実現しています。

機器について一つずつ解説していきます。
| 機器名称 | 役割 |
|---|---|
| Raspberry Pi Zero WH | 電子ロッカーの心臓部。 内部のソフトウェアは誰でも扱いやすいようにビジュアルプログラミング言語である Node-REDを採用しました。美味しいものマルシェ(ECサイト)からのロッカー解錠の 命令に従って周辺危機の操作を行っています。 あまり重たい処理は無いためスペックは重視せず、小さくて安価な Zero WHを採用。 |
| AK-020 (Soracom Air) | 通信は Soracom Air for セルラーを使っています。通信に必要なモデムとしてAK-020を 利用しています。(このモデムの中に SIMが入っています) Amazonで販売しているSORACOMスターターキットは通信量1,000円分のクーポンも ついていてお得でした |
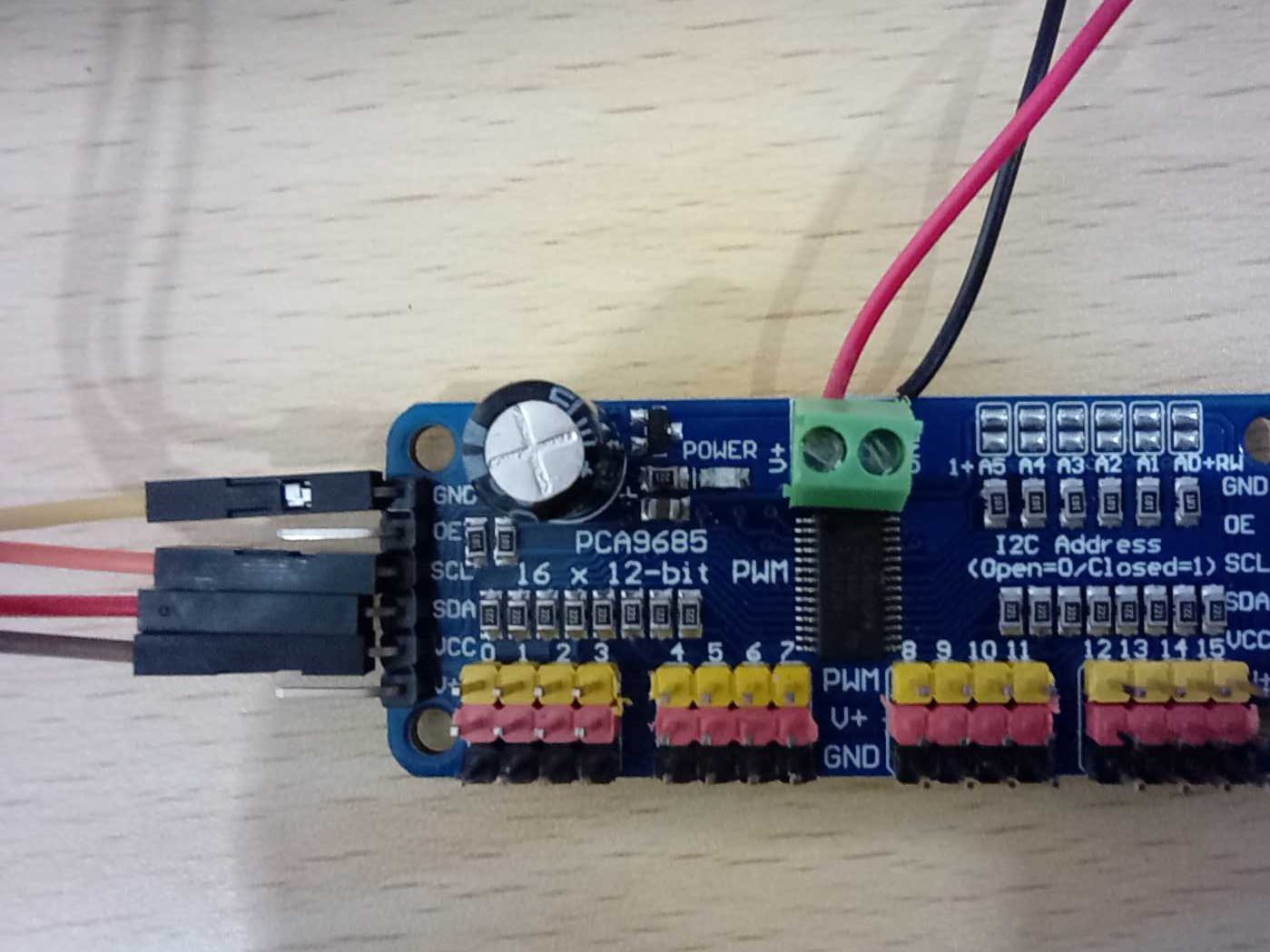
| PCA9685 | 購入者1人につき、1つずつロッカーの扉を割り当てています。それぞれのロッカーの 扉を個別に操作するためにPCA9685を使ってサーボモータを制御しています。 |
| 電池ボックス | サーボモータを動かすための電源です。プロトタイプでは電池ボックスを 使っていますが、USBからの給電になる予定です。 |
| TowerPro SG92R | ロッカーを実際に解錠するためのモーターです。扉1つにつき、1つのモーターが 使われます。写真には載せていませんが、PCA9685につなげています。 |
| 高輝度 赤色LEDランプ | ロッカーが実際に施錠・解錠されたことをユーザーが認識できるように、操作された タイミングでLEDを点滅させます。これも写真には載せていませんが、PCA9685に つなげてます。 |
配線について
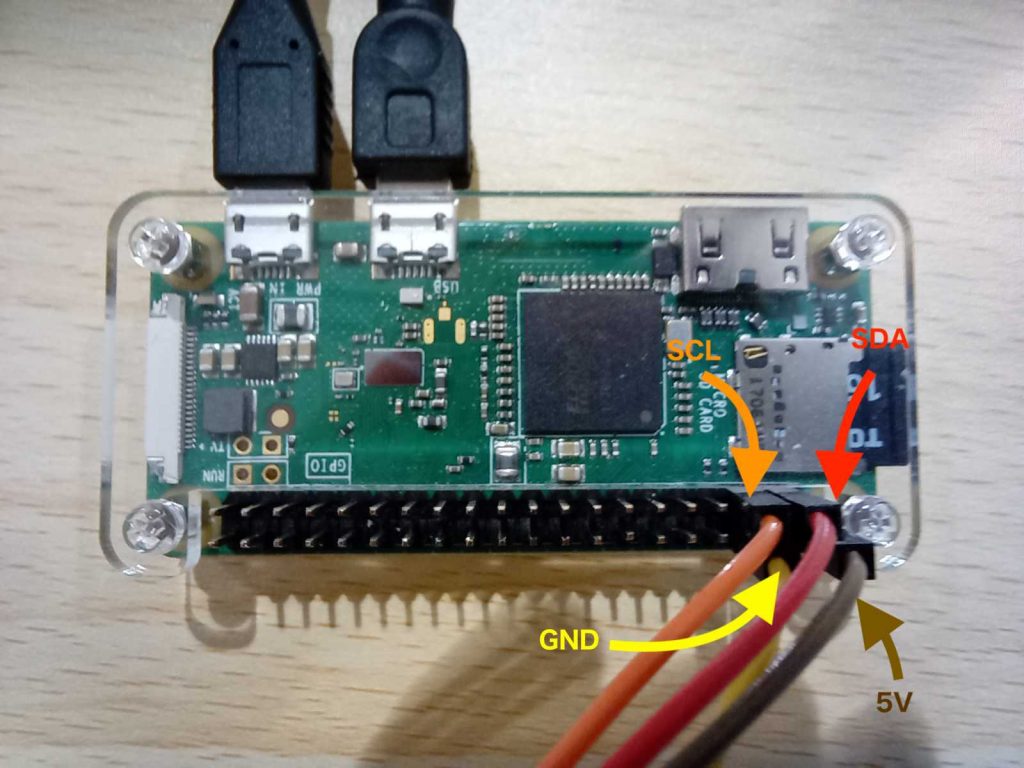
ラズパイ とPCA 9685の配線図です。GPIOは 1,3,5,6 (青枠で囲った部分)を使っています。

| ラズパイ のPIN番号 | ラズパイ側の名称 | PCA9685側のピンの名称 |
|---|---|---|
| 1 | 5V Power | VCC |
| 3 | SDA | SDA |
| 5 | SCL | SCL |
| 6 | Ground | GND |
実物の写真はこのようなイメージです。PCA9685は基盤にPINの役割が書いてあるので間違えにくいですね。
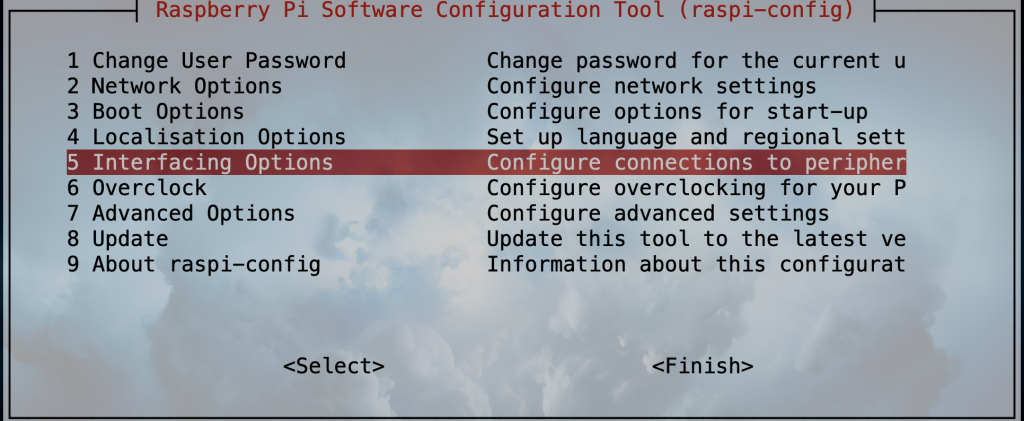
ちなみに、PCA9685を使うときにはラズパイ 側のコンフィグを変更してI2Cを有効にする必要があります。こちらの手順についての記事は多いので調べればすぐに分かると思いますが、こちらにも掲載しておきます。
sudo raspi-configこちらを実行すると表示される画面がこちら。ここで5番の Interfacing Optionsを選択して
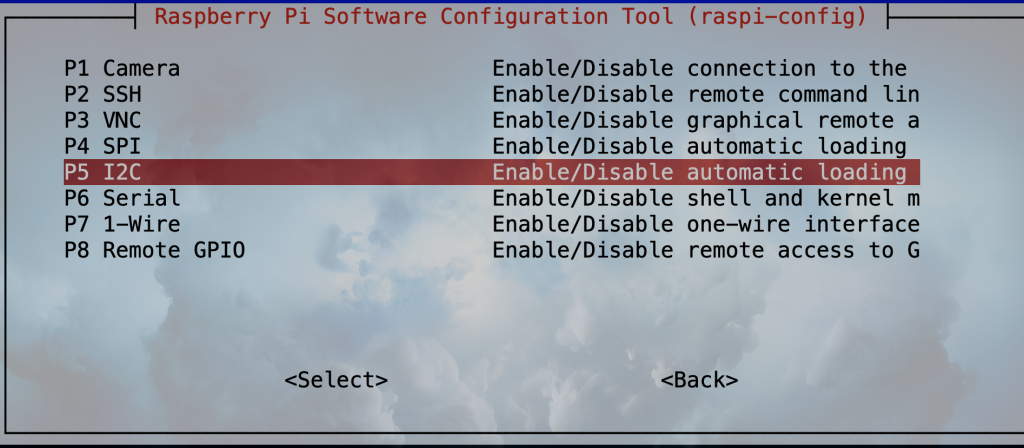
I2Cを選択
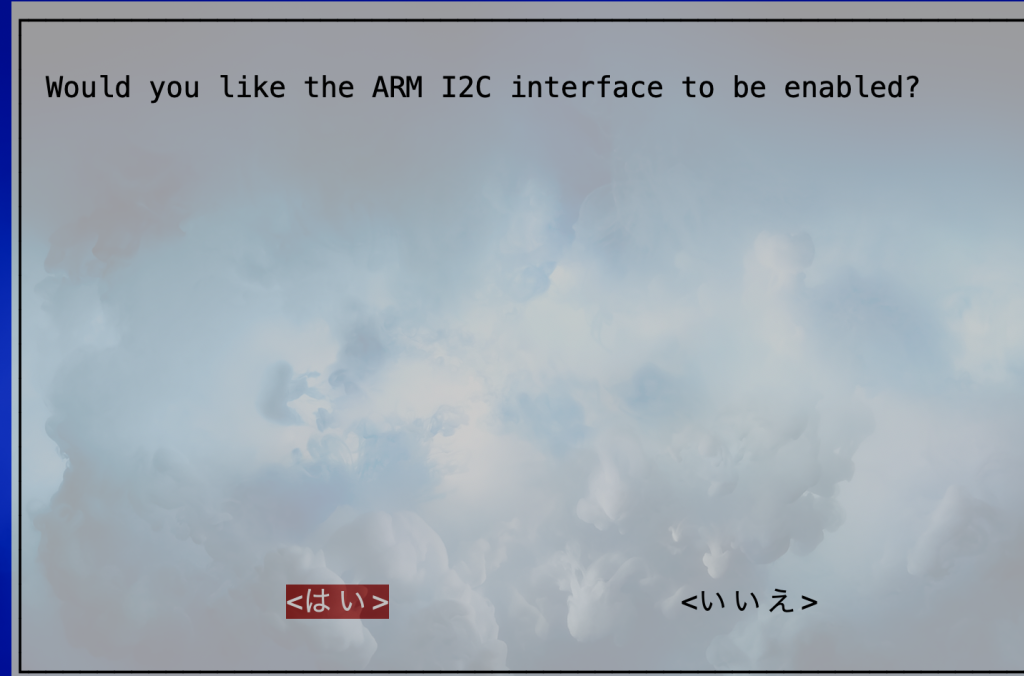
「はい」を選択して I2C interfaceを有効にしておきましょう!
これでラズパイ を通して複数のサーボモータの制御をするための準備は完了です。サーボモーター はこの様な形で扉に取り付けられています。サーボモータが約140°動くことでギアを経由して鍵が閉まり、ロッカーが施錠されている様子がご覧いただけます。
次回はラズパイ の操作に利用しているプログラム言語、Node-REDについてご紹介していきます!